

行人测试
栏目:行业动态 发布时间:2025-04-21 09:41
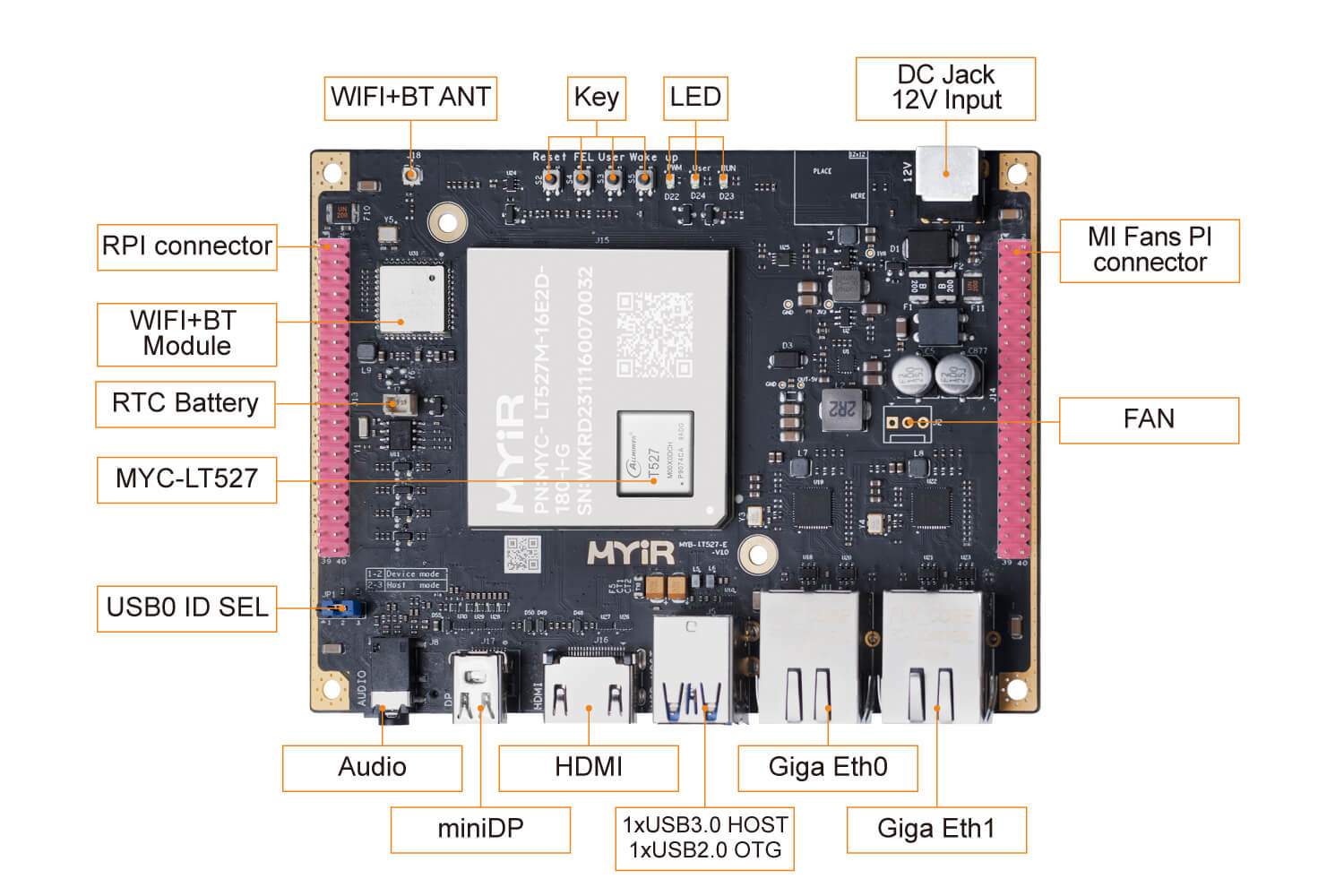 本文指出:本文将基于MyD-LT527 Mill Electronics开发委员会介绍OPENCV行人测试测试。基于Quanzhi T527开发委员会1。软件环境安装1。安装OpenCVSUDO APT-GET安装LibopencV-DEV Python3-OpenCV2。安装PIPSUDO APT-GET安装Python3-PIP2。行人发现简介使用HOG和SVM生产行人探测器的主要步骤包括:准备训练数据集:训练数据集应包含大量的正样本(PEEDY图像)和负样本(而不是非生物图像)。计算猪特征:对于每个图像,计算猪特征。猪特征是一维矢量,其中每个元素代表图像中特定位置和方向的梯度强度。 SVM分类器培训:使用HOG功能作为输入来训练SVM分类器。 SVM分类器将学会将行人与非Peedians区分开。模型分析:使用测试数据集检查训练有素的型号。计算模型的准确性,关注和标记。 3. Code Implementation Import Cv2Amport Timedef Detect (Image, Scale): Imagex = Image.Copy () #makin A copy within function, let each operate on another image #Get (the corresponding rectangle box for pedestrians, corresponding weights) (Rects, weights) = hog.detectmultiscale (Imagex, scale = scale) time_end = time.time () ._Start) Name = str (scale) cv2.imshow(name,imagex)#show原始图像效果= cv2.imread(back.jpg)检测(图像,1.01)检测(图像,1.05)检测(图像,1.3)cv2.WaitKey(Waitkey(0)CV2.DestroylAlwindows(DestroylAlalwindows()4。 Quanzhi T527处理器,八核A55,很好地实现了计算的边缘;出色的多媒体功能:G57 GPU,4K编解码器VPU,HIFI4 DSP,支持4〜6通道相机;支持多个显示接口:HDMI,DP,LVD,MIPI-DSI和RGB并行端口,支持4K+1080p双唯一显示;丰富的通信接口:2*GE,2*CAN,PCIE/USB3.0,2*USB2.0,10*UART,30*PWM,4*SPI,9*I2C等; T527是真正的工业-40℃〜+85℃;超紧凑型LGA 381PIN包;适用于高性能的工业机器人,显示和控制全能机器,车辆终端,智能盒和其他应用程序场景。
本文指出:本文将基于MyD-LT527 Mill Electronics开发委员会介绍OPENCV行人测试测试。基于Quanzhi T527开发委员会1。软件环境安装1。安装OpenCVSUDO APT-GET安装LibopencV-DEV Python3-OpenCV2。安装PIPSUDO APT-GET安装Python3-PIP2。行人发现简介使用HOG和SVM生产行人探测器的主要步骤包括:准备训练数据集:训练数据集应包含大量的正样本(PEEDY图像)和负样本(而不是非生物图像)。计算猪特征:对于每个图像,计算猪特征。猪特征是一维矢量,其中每个元素代表图像中特定位置和方向的梯度强度。 SVM分类器培训:使用HOG功能作为输入来训练SVM分类器。 SVM分类器将学会将行人与非Peedians区分开。模型分析:使用测试数据集检查训练有素的型号。计算模型的准确性,关注和标记。 3. Code Implementation Import Cv2Amport Timedef Detect (Image, Scale): Imagex = Image.Copy () #makin A copy within function, let each operate on another image #Get (the corresponding rectangle box for pedestrians, corresponding weights) (Rects, weights) = hog.detectmultiscale (Imagex, scale = scale) time_end = time.time () ._Start) Name = str (scale) cv2.imshow(name,imagex)#show原始图像效果= cv2.imread(back.jpg)检测(图像,1.01)检测(图像,1.05)检测(图像,1.3)cv2.WaitKey(Waitkey(0)CV2.DestroylAlwindows(DestroylAlalwindows()4。 Quanzhi T527处理器,八核A55,很好地实现了计算的边缘;出色的多媒体功能:G57 GPU,4K编解码器VPU,HIFI4 DSP,支持4〜6通道相机;支持多个显示接口:HDMI,DP,LVD,MIPI-DSI和RGB并行端口,支持4K+1080p双唯一显示;丰富的通信接口:2*GE,2*CAN,PCIE/USB3.0,2*USB2.0,10*UART,30*PWM,4*SPI,9*I2C等; T527是真正的工业-40℃〜+85℃;超紧凑型LGA 381PIN包;适用于高性能的工业机器人,显示和控制全能机器,车辆终端,智能盒和其他应用程序场景。 下一篇:没有了